Robótica: percibir, pensar y actuar
El movimiento de nuestros brazos está controlado mediante poblaciones de neuronas ubicadas en la corteza motora. Patrones de actividad cortical se han utilizado en interfaces cerebro-máquina para mostrar cómo cursores sobre pantallas de ordenador se pueden mover en dos y tres dimensiones espaciales. Aunque la capacidad de movimiento de un cursor puede ser medianamente útil, esta tecnología podría aplicarse para restablecer la funcionalidad del brazo y de la mano en individuos amputados y paralíticos. Sin embargo, el uso de señales corticales para controlar una prótesis articulada en tiempo real en un entorno físico no había sido demostrado. Aquí se describe un sistema que permite el control de prótesis; y nos muestra cómo monos utilizan su actividad cortical motora para guiar un brazo mecanizado en una tarea de auto-alimentación. Además de las tres dimensiones de movimiento, las señales corticales también controlan proporcionalmente una pinza en el extremo del brazo. Debido a la interacción física entre el animal, el brazo robótico y los objetos en el espacio de trabajo, esta nueva acción presentó un mayor nivel de dificultad que los anteriores experimentos virtuales (cursor-control).
Este significativo avance podría beneficiar el desarrollo de prótesis para personas discapacitadas, con amputaciones o parálisis que necesiten la restauración de alguna extremidad, con lesiones a la médula espinal y con condiciones tales como la enfermedad de Lou Gehrig o esclerosis lateral amiotrófica. Esta es una de las demostraciones más sorprendentes de la llamada tecnología de cerebro-control de interfaces artificiales.
Sintonía a través de la acción
Los pacientes con lesión medular, accidente cerebrovascular subcortical, enfermedades neuromusculares (incluyendo la esclerosis lateral amiotrófica) y amputación de extremidades tienen al menos dos características en común: un cerebro que quiere dirigir el movimiento y un cuerpo que no responde en consecuencia. A pesar de la función cortical intacta, las personas con estos trastornos paralizantes están "desconectadas" de sus objetivos, con señales destinadas al movimiento pero que no son reconocidas por el sistema nervioso central o periférico. Tratamientos farmacológicos, celulares y otros manejos han sido diseñados para reparar el daño sobre el terreno, por lo que la lesión podría ser simplemente dejada de lado. Pero, ¿existen nuevas vías para que estas señales controlen nuestras propias extremidades o dispositivos de ayuda tales como las prótesis? Un estudio reciente realizado por Meel Velliste y colaboradores (Nature 2008; 453:1098-1101) representa un paso hacia estos objetivos.
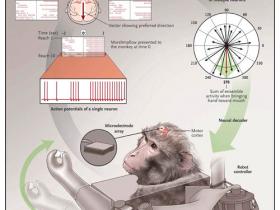
La corteza motora primaria (M1) es vital para controlar la destreza fina de los dedos de la mano y la mano en general, tanto en monos como en seres humanos. Estudios de neuronas M1 en monos bajo desempeño de tareas manuales, como agarrar un joystick, han revelado una asociación entre los cambios en el potencial de acción de estas células y la dinámica y cinemática del movimiento de la mano. En particular, algunas neuronas M1 demuestran una "dirección en sintonía": se activaban en mayor frecuencia cuando un animal llega a una determinada dirección (la "dirección preferida" para la célula) y caen a un mínimo de frecuencia cuando el animal llega a la dirección opuesta (figura 1). Esto puede ser modelado como una curva tipo coseno que ajusta la dirección del movimiento, pudiendo predecir (con diversos grados de precisión) la orientación del movimiento de las extremidades.
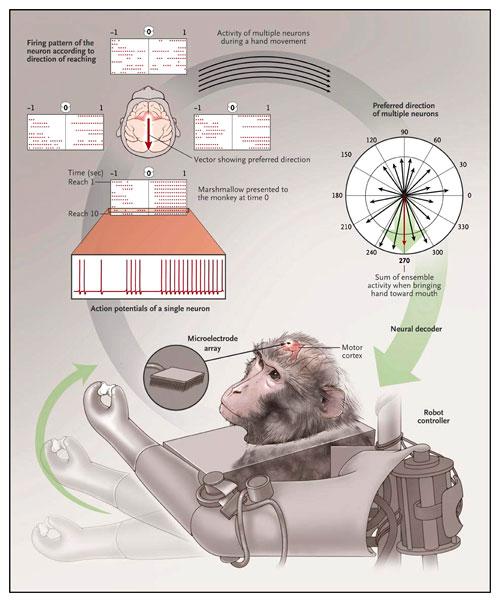
Velliste y colegas informaron recientemente un avance al usar un brazo robótico en monos a través de los impulsos generados por la corteza motora. Una serie de microelectrodos se colocaron en la corteza motora, lo que permitió el potencial de acción de decenas de neuronas registradas de manera simultánea. Si el animal llegaba a una determinada dirección (se muestran 10 "llegadas" abajo, arriba, a la derecha y a la izquierda), la actividad de algunas neuronas se dirigía sintonizadamente; la neurona en particular mostrada en esta figura era más probable de activar cuando el animal llegaba abajo, en este caso, después de la presentación de un malvavisco en el momento 0. La dirección preferida se ilustrada por la flecha roja. La activación de múltiples neuronas, lo que refleja direcciones preferidas distribuidas al azar, se representa en un gráfico, con la longitud de cada vector durante el movimiento de la mano. La actividad de una población de neuronas se registra en un decodificador neural. Los descodificadores se manejaron a través de una variedad de técnicas computacionales emergentes para determinar la dirección del movimiento de las extremidades y la actividad de la población neural y, a su vez, comandar un controlador, que mueve el brazo del robot en la dirección deseada.
No es mucho lo que puede deducirse de la observación de la activación instantánea de una sola neurona, sobre todo si se desea predecir el movimiento de una extremidad en un espacio tridimensional. Con los últimos adelantos en tecnología y técnicas quirúrgicas, sin embargo, se pueden insertar diminutos microelectrodos en la corteza, permitiendo el registro de la actividad para un centenar de neuronas en tiempo real. Un conjunto relativamente pequeño, o una población, de neuronas M1 direccionalmente sintonizadas permite predecir la ubicación de la mano de un animal, por ejemplo, cuando él mueve un joystick para controlar un cursor en un videojuego. En dichos experimentos, los animales a menudo se detienen durante el movimientos de su mano, intentando controlar el cursor mediante el poder neuronal por sí solo.
M. Velliste y colaboradores se centraron en el control neuronal de una prótesis de brazo para llevar a cabo una tarea de importancia evidente: llegar a los alimentos, captarlos y dirigirlos a la boca. Dos monos fueron entrenados para usar un joystick, junto a una prótesis de brazo con el hombro y las articulaciones del codo y un terminal de agarre. Después de 2 a 3 meses, el control de la prótesis del brazo se desplazó gradualmente desde el joystick a la neurona, con el control neuronal manejado por un "vector poblacional": la suma de la actividad registrada al mismo tiempo y las neuronas M1 sintonizadas direccionalmente. El grupo de Velliste utilizó la actividad cortical para definir la ubicación de punto final y el software del robot que convertiría, entonces, estos comandos en un conjunto de movimientos adecuados. Ambos monos utilizaron el brazo robot para llegar en varias ocasiones al alimento (por ejemplo, un malvavisco), agarrarlo, llevarlo a la boca, y liberarlo, todo realizado en tiempo real y decodificado por un pequeño número de células de la corteza motora. Por otra parte, los autores también entrenaron monos para abrir y cerrar la pinza robot usando la actividad neuronal de esta misma población de neuronas.
Los animales del estudio eran neurológicamente sanos, pero los resultados son relevantes en el desarrollo de interfaces neuronales para ayudar a personas con parálisis. Previamente se había descrito a un hombre con una tetraplejia por lesión de la médula espinal C4 que utilizó señales M1 similares a las registradas en los dos monos para controlar un cursor de un computador, una prótesis, y en una ocasión, un brazo robot para agarrar y transportar una objeto. En este y otros casos, la señal extraída de M1 fue útil para el dispositivo de control en cuestión de minutos. Esto sugiere que la actividad cortical asociada con la intención de movimiento puede persistir a pesar de la parálisis y que esta señal podría aprovecharse para la readquisición natural de la propia integridad física o para conducir un dispositivo auxiliar (como una silla de ruedas) o, en amputados, para controlar una prótesis de extremidades.
Sin embargo, existen desafíos por delante en la creación de un sistema que proporcione un control neuronal de los implantes o dispositivos externos las veinticuatro horas del día. La mayoría de los sistemas requieren un conector percutáneo; sistemas totalmente implantables deberían reducir el riesgo quirúrgico y postoperatorio y aumentar las posibilidades de utilizar electrodos en múltiples regiones del cerebro para proporcionar un control más fino del dispositivo. El hardware utilizado para separar y amplificar las señales neuronales tiene que ser miniaturizado y automatizado. Al igual que los estimuladores que se colocan profundamente en el cerebro para trastornos del movimiento, estos sistemas deberían ser usados en beneficioso de los pacientes sin la necesidad de configurar el equipo cada día. Son necesarios ensayos clínicos para la seguridad y viabilidad, en parte para poner a prueba la eficacia de estos dispositivos en el contexto de los diferentes procesos de una enfermedad. Dicho esto, los conocimientos adquiridos a través del trabajo de Velliste y colaboradores y de estudios preclínicos similares no sólo proporcionan una mejor comprensión de los mecanismos cerebrales para el control motor y la plasticidad cortical, sino también genera una plataforma que permite seguir desarrollando estrategias de neuro-ingeniería que puedan mejorar la movilidad y la independencia.
Fuente bibliográfica
Turning Thought into Action
Leigh R. Hochberg, M.D., Ph.D.
Massachusetts General Hospital and Harvard Medical School, Boston, USA.
N Engl J Med. 2008 Sep 11;359(11):1175-7